
Soft robots are well-suited for tasks that require safely interacting with delicate objects and humans. However, they have a number of shortcomings that limit their usefulness such as low payload capacity, poor proprioception, and slow response times. We develop novel mechanisms, materials, and sensors to address these shortcomings and increase the physical capabilities of soft robots.
Publications
- D. Bruder, M. Graule, C. Teeple, R.J. Wood. "Increasing the Payload Capacity of Soft Underactuated Robot Arms via Selective Joint Stiffening". Science Robotics. 2023. [link] [bibtex] [video]
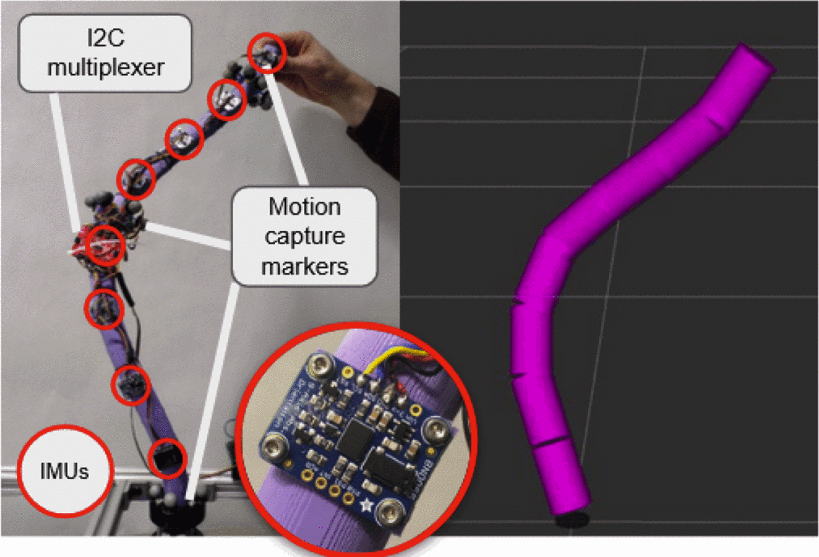
- Y.J. Martin, D. Bruder, R.J. Wood. "A Proprioceptive Method for Soft Robots using Inertial Measurement Units". IEEE International Conference on Intelligent Robots and Systems (IROS). 2022. [link]